Strona GłównaBlogs / brahi's blog / Poprawiamy krzywiznę PAVO5..
Poprawiamy krzywiznę PAVO5..

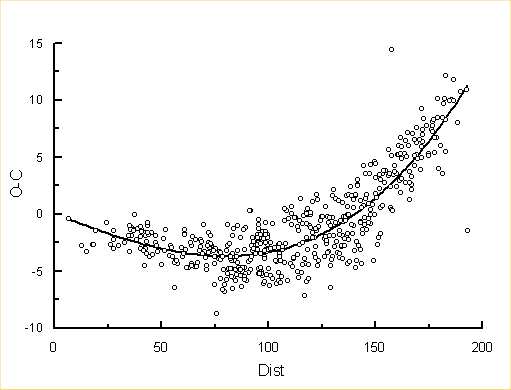
Funkcja opisująca poprawkę dla przykładowej kamery PAVO5 faktycznie jest wielomianem 3 stopnia. Żadna wyższa matematyka nie jest tu potrzebna ;)
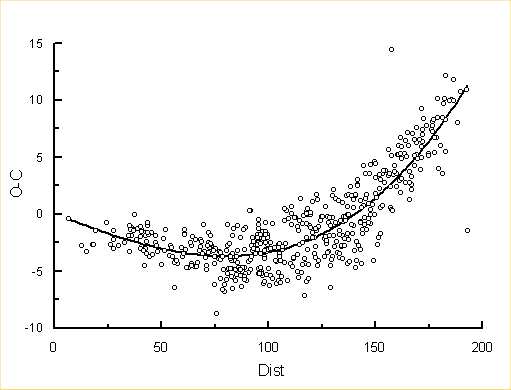
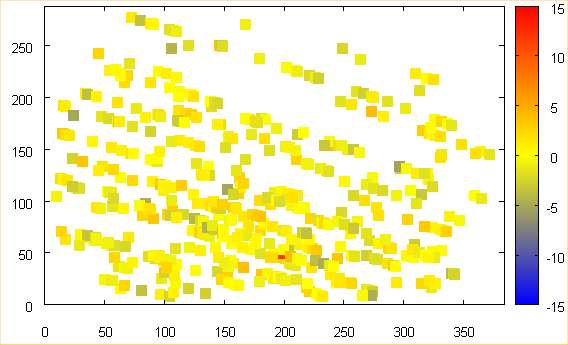
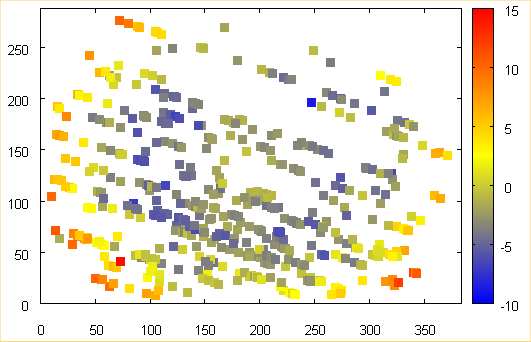
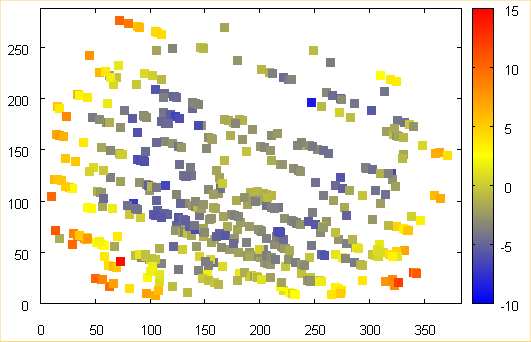
Obrazek przed poprawieniem wygląda następująco.
Przesunięcie gwiazd o znalezioną według funkcji poprawkę załatwia praktycznie problem dystorsji. W tym wypadku oczywiście jest do dość przyjemny symetryczny przypadek. W sytuacji gdy centrum zniekształceń nie leży w centrum obrazka należy takie centrum znaleźć i wszelkie poprawki wyprowadzać z owego centrum a nie z geometrycznego środka obrazka.
Postępowanie jest nieomal takie jak w metodzie Boroviczki dla obiektywów fisheye z tym że tu jest prościej ;)
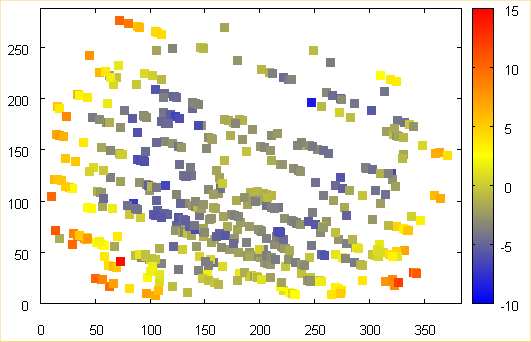
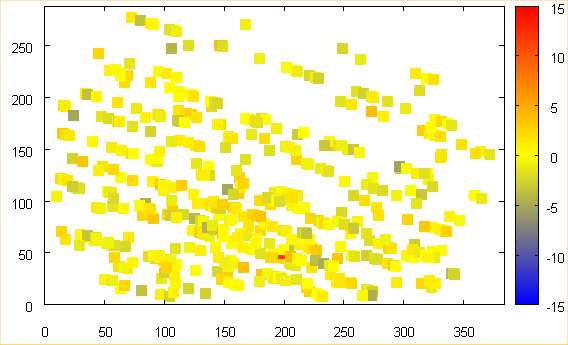
Błędy (w pikselach) na obrazku poprawionym wyglądają tak:
Średni błąd dla całego obrazka - 1.9' :)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- brahi's blog
- Login to post comments